I worked with Mike Bomber who is the current UAS technician to try and locate the issue with the platform. I downloaded the Flash Logfiles from the Pixhawk to examine the various reports created. The most noticeable variation between a good flight and the flight which had issues was the amount of vibration (Fig 1 & 2).
 |
| (Fig. 1) A good flight vibration readout from Mission Planner Flash Log files. |
 |
| (Fig 2) The vibration readout from the flight when incurred issues. You can see a drastic increase in vibration near the end of the flight plus error logs were recorded which sent the platform into a fail safe mode. |
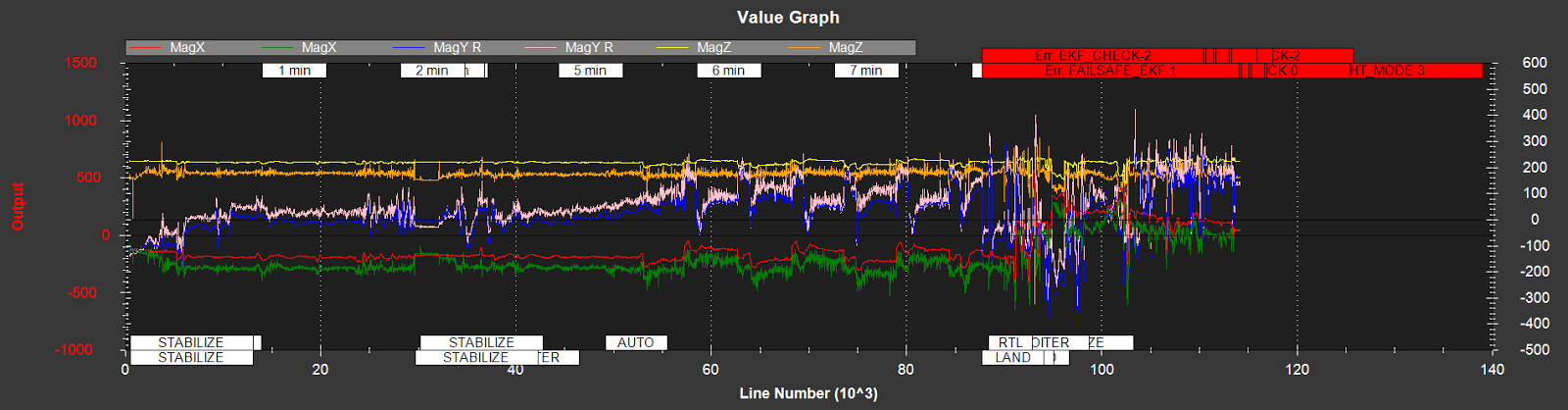 |
| (Fig. 3) Max consistency XYZ from the trouble flight. You can see issues throughout the majority of the flight. |
Due to the recent issues with the Matrix and information from the flight logs we decided to move a few items on the Matrix frame to reduce vibration and eliminate possible interference between electrical components. Additionally we changed the GPS to a newer model which utilizes various satellites for better location accuracy.
We moved the the Pixhawk from the middle of the frame to the top utilizing the mount and bubble top from the Hexacopter. The plate was mounted on rubber dampeners to help reduce the vibration to the Pixhawk.
Additionally, we installed the new GPS with a copper grounding plate mount. We had installed the same model GPS on a different platform and we achieved connection with 20 satellites.
 |
| (Fig. 4) Matrix platform with changes made based on the information from the Mission Planner Flash Log files. |
We hope to be able to perform a few test flights in the upcoming weeks.
No comments:
Post a Comment