Mike Bomber was the pilot in command (PIC) and I was the pilot at the controls (PAC) and Dr. Joesph Hupy was the spotter.
Mike flew the platform manually for a while test the loiter function as we were able to identify issues while in loiter previously. We did not see any of the previous issues during this test. We decided to create a small mission in Mission Planner to fully test platform. We ran the mission 4 times while we adjusted a few settings improving the flight characteristic. No issues were encountered during any of these flights.
I examined the same Vibration and Max Consistency XYZ reports in Mission Planner to compare with previous good flights. The reports are not as good as previous flights but they are certainly better then the flights where the issues occurred.
 |
| (Fig. 1) Vibration report from flight after alterations were made to the Matrix platform. |
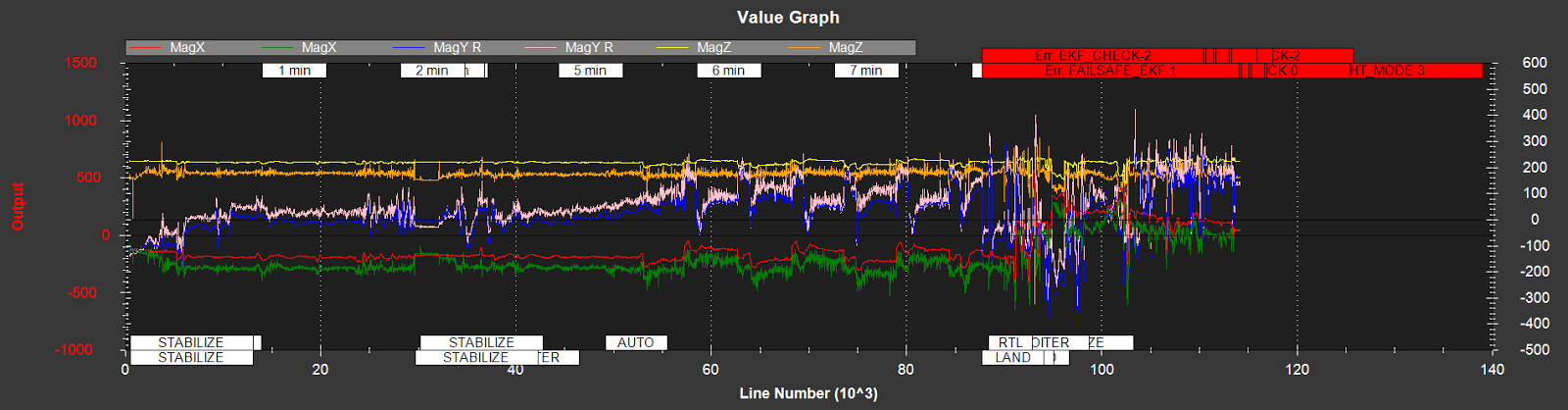
 |
| (Fig. 2) Max Consistency XYZ report from the flight after alterations were made to the Matrix platform. |